本装置ではロボット専用コントローラを導入することなく、
汎用PLCでスカラロボットのキネマティクス(座標変換)演算を実現しています。
高価なロボットシステムを購入する必要がないため、
システム全体のコストを大幅に抑えることができます。
また、ロボットと周辺機器の制御を同一PLC内で実行できるため、
余計なネットワーク通信や配線が不要になり応答性が向上します。
さらに同じプログラム内でロボットと周辺機器の処理を効率よく記述できるため、開発工数の削減も可能です。
制御のポイント
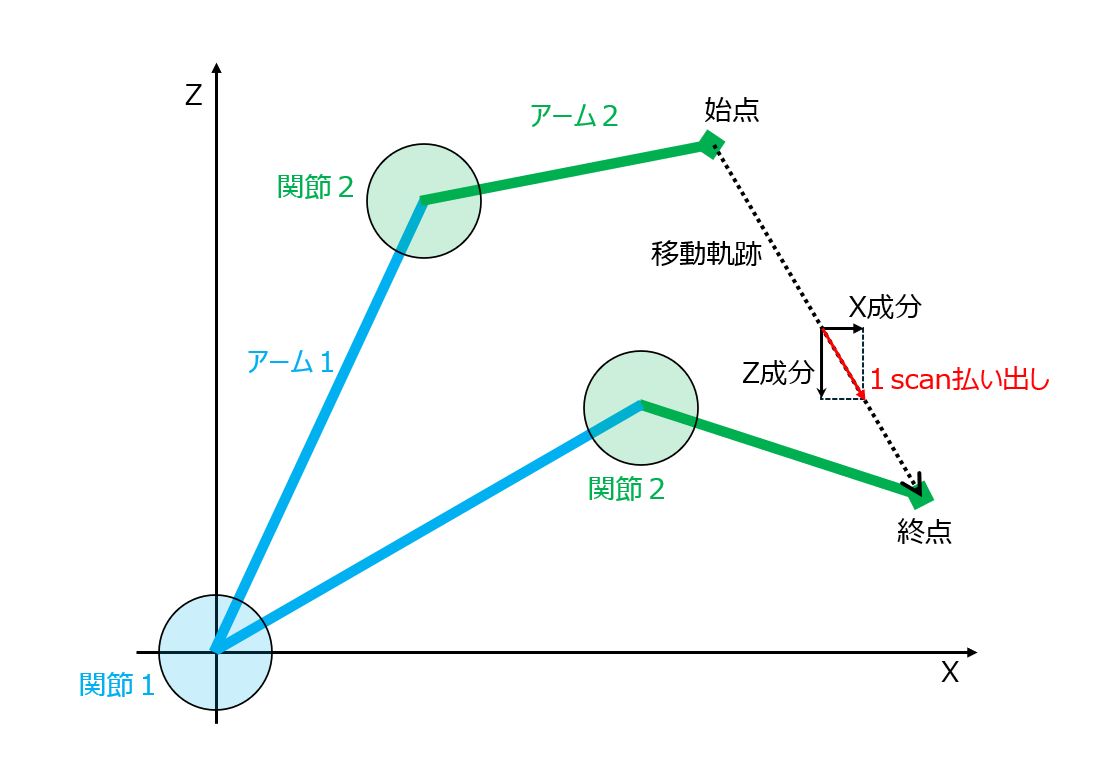
1.指令生成
・直交座標での今回目標位置演算
始点、終点、速度から毎スキャンのX成分とZ成分の払い出し量を算出します。
 ・関節座標への変換
・関節座標への変換
アーム先端の直交座標位置から肩関節と肘関節の角度を演算します。
※ 左手系、右手系で演算が異なります。
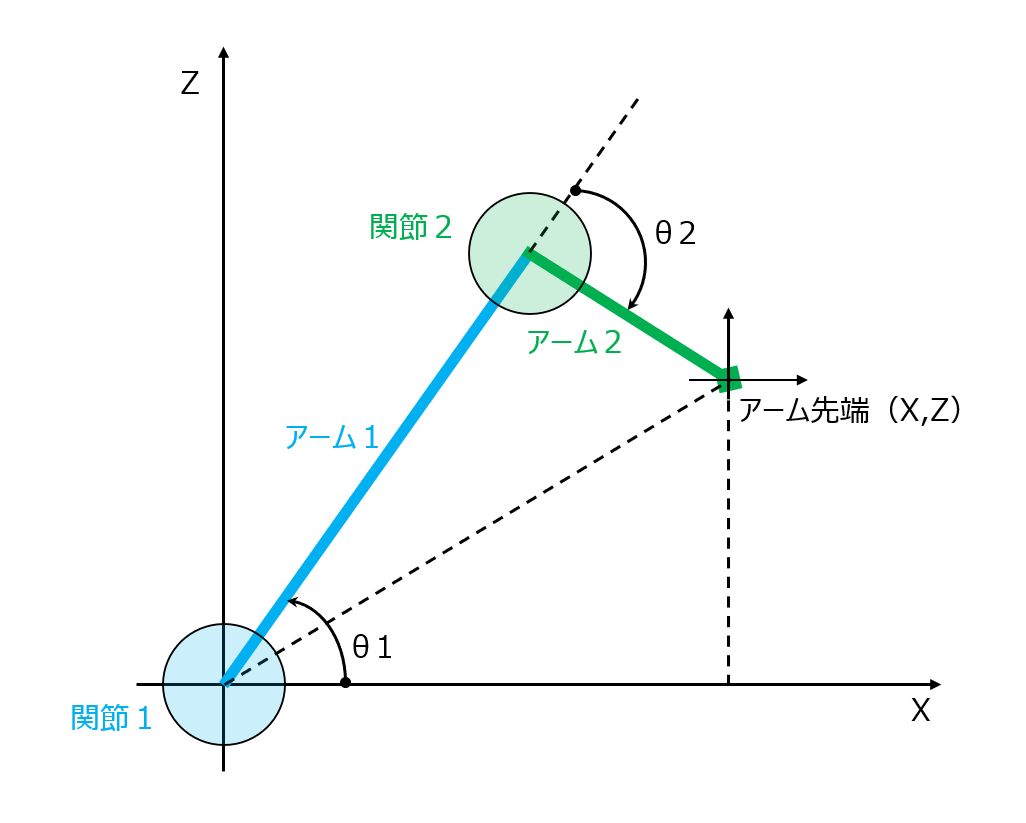 2.現在座標モニタ
2.現在座標モニタ
各関節のモータ現在角度からアーム先端の直交座標位置を算出します。