半導体工場内でFOUPと呼ばれるウェーハ容器を目的地まで自律走行して運び、
ピック&プレイスします。
走行部はvSLAM技術によりガイドレスで障害物を回避しながら目的地まで自律走行します。
HMIは汎用パソコンにExcelで作成しているためユーザは使い慣れた環境で作業ができ、
現場でのカスタマイズも特別な開発ツールは不要です。
ロボットの停止位置およびFOUPのピック&プレイスは それぞれに画像処理を用意して位置補正しています。
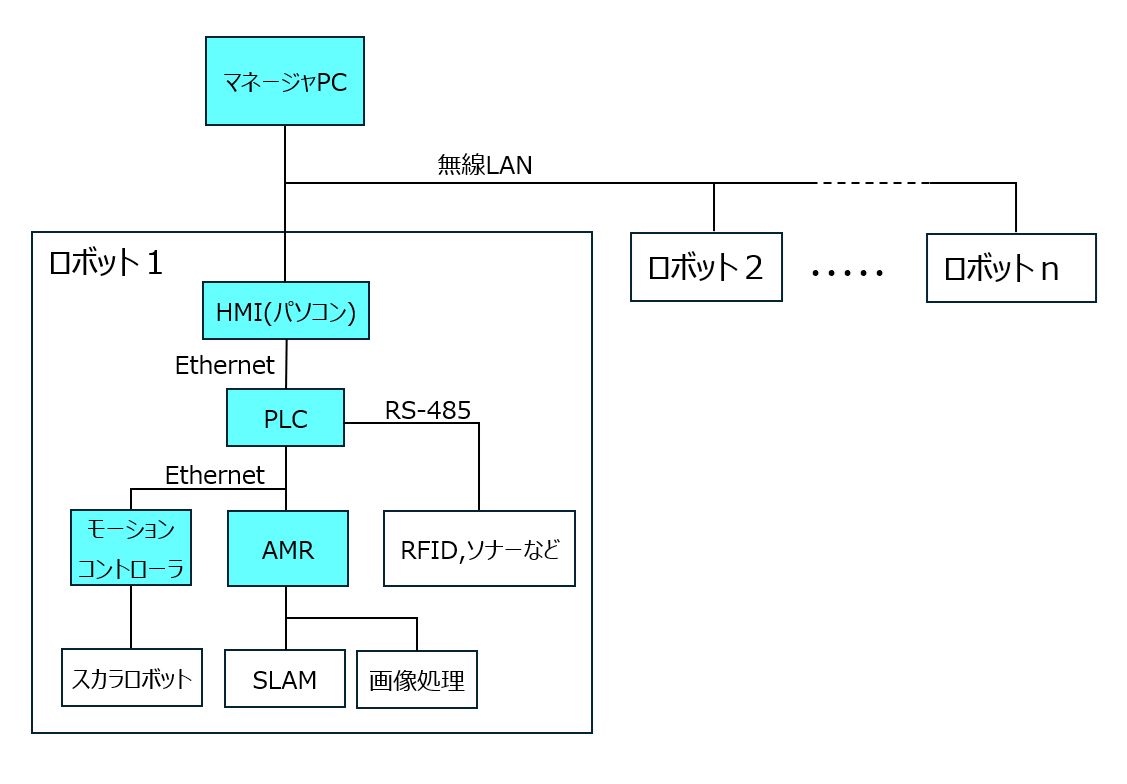
システム構成
マネージャPC(上位管理システム)
各ロボットに経路およびFOUPの取り付け/取り出しを指示します。
パソコン
・HMIとしてExcelを採用し、データの表示、設定、機器の操作を行っています。
・各機器とのインターフェイスとなるプロトコルはVBAで実装しています。
PLC
本システムの中心に位置づけられ各機器への動作指示や状態を管理します。
モーションコントロールボード
スカラロボットの両腕を同期制御してFOUPをピック&プレイスします。
AMR
vSLAMによる自己位置推定と画像処理を組み合わせ、
ガイドなしで目的地まで自律走行します。